喝咖啡走路是我们大多数人每天都会做的事情,而没有考虑它需要的平衡行为。事实上,有很多物理原理可以防止咖啡溢出。
咖啡是一种包含在杯子中的热搅动流体,具有与杯子相互作用的内部自由度,而杯子又与人类载体相互作用。
“虽然人类拥有与复杂物体交互的自然或天赋能力,但我们对这些交互的理解——尤其是在数量层面上,几乎为零,”亚利桑那州立大学电气工程教授 Ying-Cheng Lai 说. “我们没有有意识的能力来分析外部因素(如噪音或气候)对我们互动的影响。”
然而,了解这些外部因素是软机器人等应用领域的基本问题。
“例如,在智能假肢的设计中,建立模仿人体四肢自然运动的自然柔韧性模式变得越来越重要,”赖的前本科生,现在是亚利桑那州立大学 Ira 的博士生布伦特华莱士说A. 富尔顿工程学院。“这些改进使用户感觉假肢更加舒适和自然。”
赖认为,可以想象,在不久的将来,机器人将被部署在复杂物体处理或控制的各种应用中,这些应用需要人类擅长的那种协调和运动控制。
如果机器人被设计为以相对较短的步幅行走,则允许步行频率的相对较大的变化。但是,如果需要更长的步幅,则应谨慎选择步行频率。
发表在《物理评论应用》上的一篇新论文“复杂对象控制中的同步转换”起源于华莱士,作为其电气工程高级设计项目的一部分,由赖监督。Wallace 获得了 NSF 研究生奖学金,现在是 ASU 电气、计算机和能源工程学院的博士生。
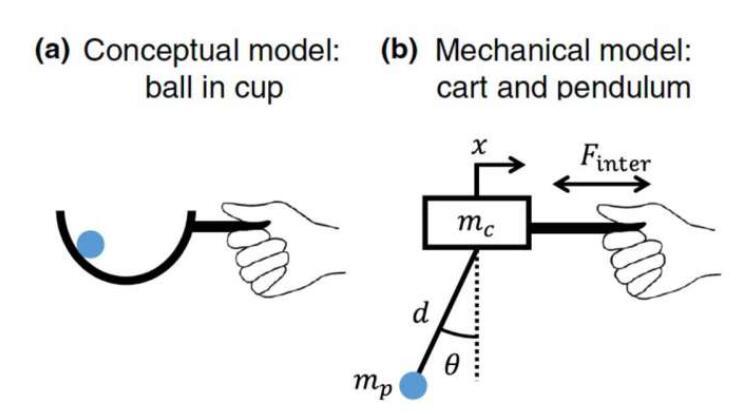
ASU 团队的研究扩展了最近由东北大学的研究人员进行的一项开创性的虚拟实验研究,使用咖啡杯固定范式并添加了一个滚动球,以研究人类如何操纵复杂物体。参与者故意以有节奏的方式旋转杯子,并能够改变力量和频率,以确保球被控制住。
东北大学的研究表明,参与者倾向于选择低频或高频策略——杯子的有节奏运动——来处理复杂的物体。
一个显着的发现是,当使用低频策略时,振荡表现出同相同步,但当使用高频策略时,会出现反相同步。
“由于低频和高频都有效,可以想象虚拟实验中的一些参与者改变了策略,”华莱士说。“这提出了问题。
“如何从与低频策略相关的同相同步过渡到与高频策略相关的反相同步,反之亦然,”华莱士问道。“在参数空间中,同相和反相同步机制之间的边界是尖锐的、渐进的还是复杂的?”
在华莱士的好奇心的推动下,ASU 团队的研究使用了一个摆锤的非线性动力学模型来研究同相和反相同步之间的转变,该模型连接到受到外部周期性强迫的移动小车上。
研究人员发现,在弱强迫状态下,随着外部驱动频率的变化,转变是突然的,并且发生在共振频率处,这可以使用线性系统控制理论完全理解。
在这个范围之外,在同相和反相同步之间出现一个过渡区域,其中小车和钟摆的运动不同步。还发现在低频侧的过渡区域内和附近存在双稳态。
总的来说,结果表明人类能够从一个同步吸引子突然有效地切换到另一个同步吸引子,这种机制可用于设计智能机器人,以在不断变化的环境中自适应地处理复杂的物体。
“人类有可能能够巧妙地使用同相和反相策略,并顺利地从一种策略切换到另一种策略,甚至可能没有意识到。这项研究的结果可用于将这些人类技能应用于软机器人以及其他领域的应用,例如康复和脑机接口,”赖说。
此外,像在装配线上在车身中铺设电线一样琐碎的任务(人类可以轻松完成)仍然无法使用最先进的机器。
华莱士说:“对人类如何与环境动态互动的系统定量理解将永远改变我们设计世界的方式,并可能彻底改变智能假肢的设计并开创制造和自动化的新时代。” “通过模仿人类在处理复杂物体时采用的动态有利行为,我们将能够使以前认为不可能的过程自动化。”